PRACOWNIA SYSTEMÓW WBUDOWANYCH
Rok 2018






Rok 2017




Rok 2016






Rok 2015




Rok 2014







Rok 2013







Projekt, oprogramowanie i wykonanie urządzenia drukującego w nietypowych materiałach
Urządzenie zaprojektował, oprogramował i wykonał absolwent informatyki Krystian Kmieciak w ramach pracy inżynierskiej zatytułowanej “Projekt i implementacja urządzenia drukującego w nietypowych materiałach” przygotowanej pod kierunkiem dra Jacka Iwańskiego.
Inteligentny dom – projekt i implementacja systemu sterującego urządzeniami elektrycznymi
Projekt inteligentny dom wykonał absolwent informatyki Adrian Lipowski. Inteligentny dom był tematem pracy inżynierskiej zatytułowanej “Inteligentny dom – projekt i implementacja systemu sterującego urządzeniami elektrycznymi” przygotowanej pod kierunkiem dra Jacka Iwańskiego.
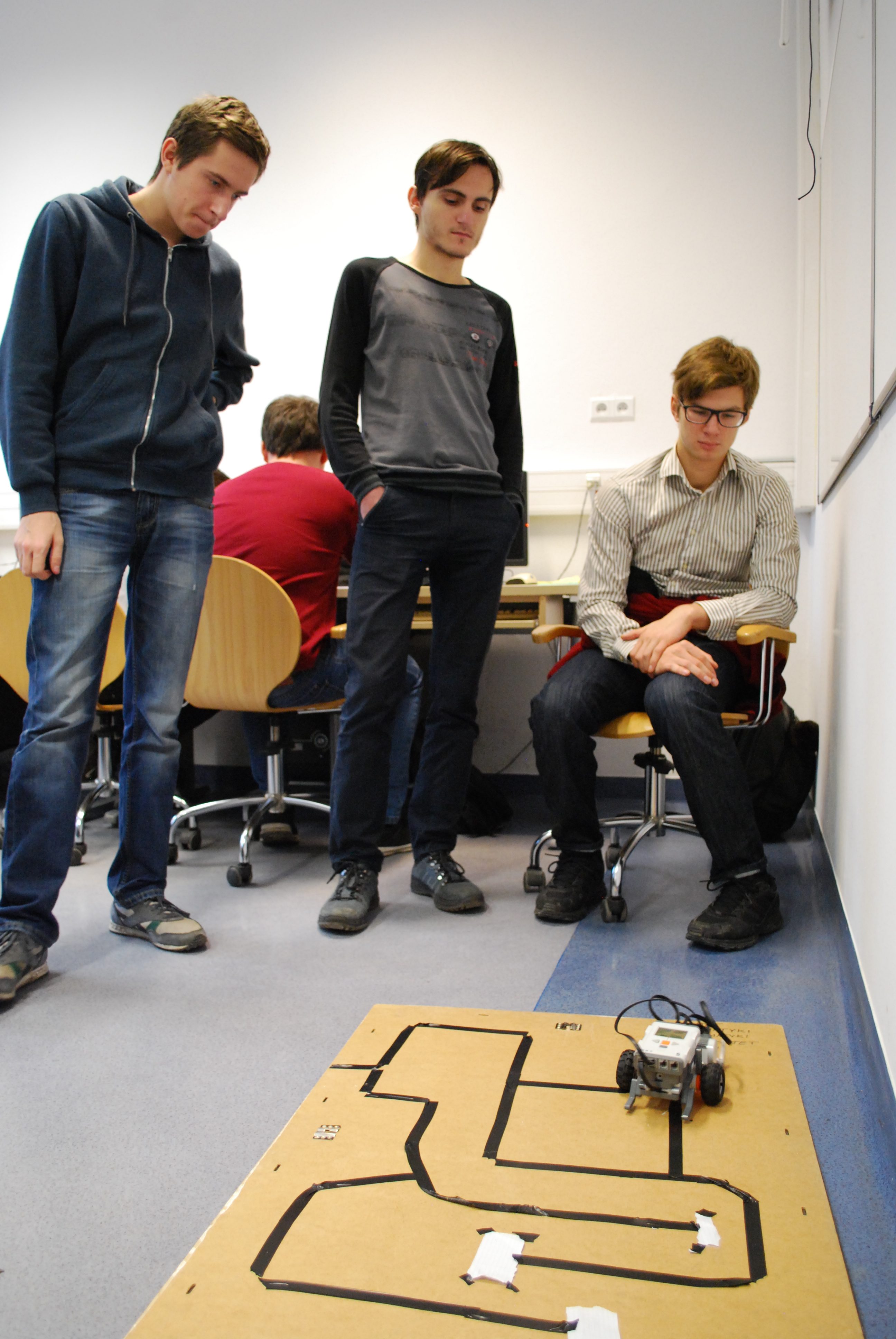
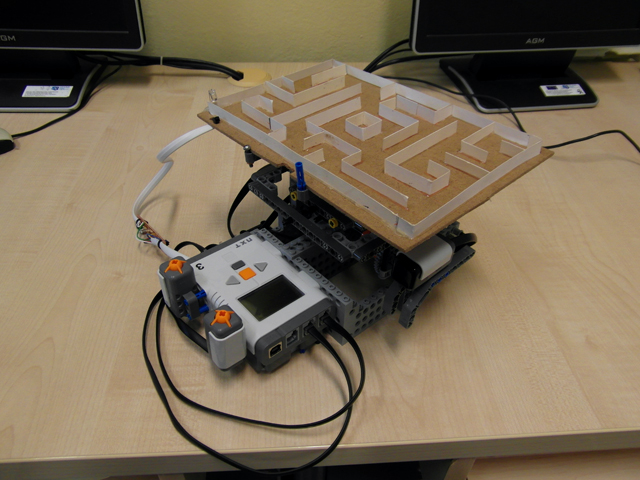
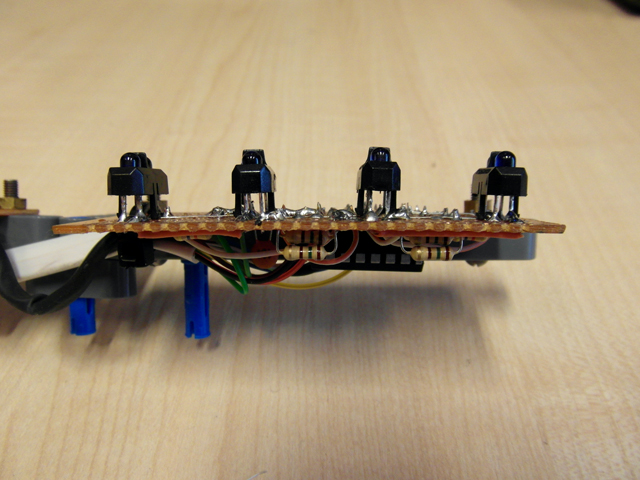
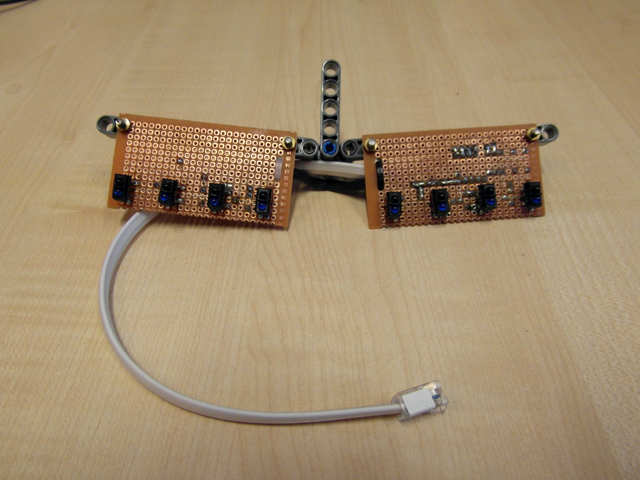
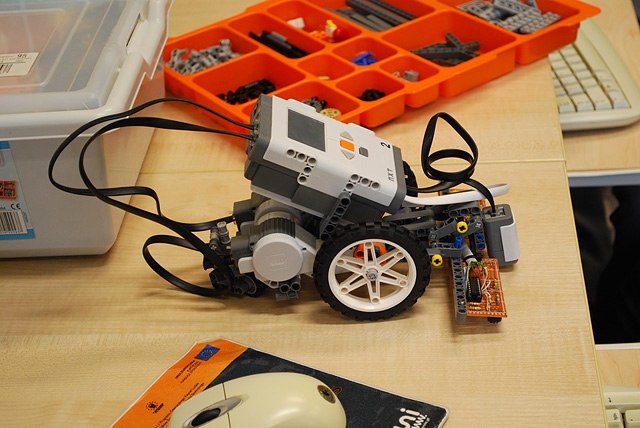
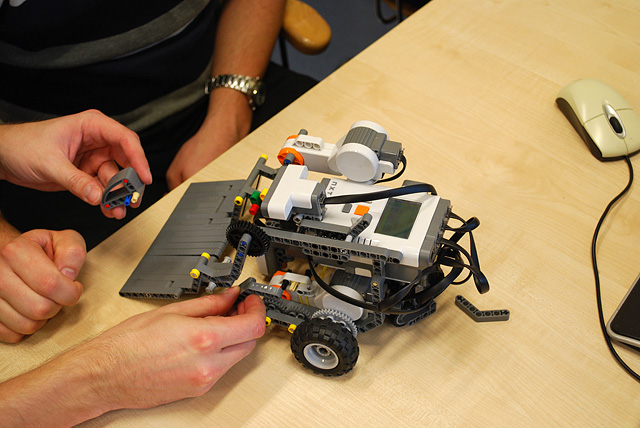
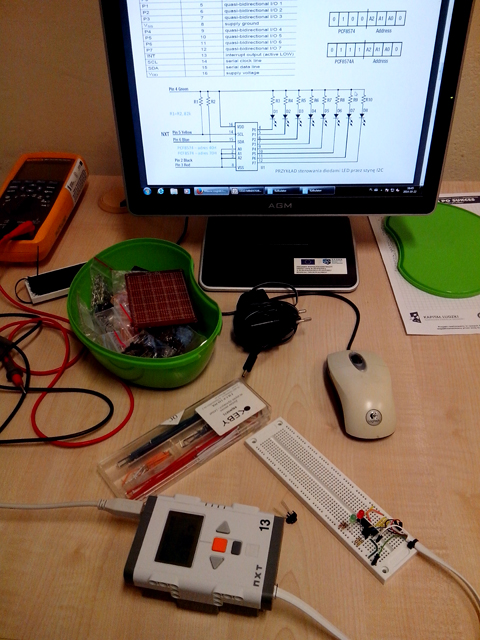
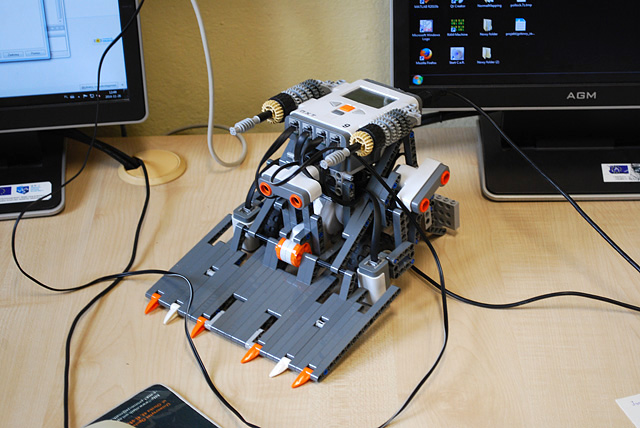
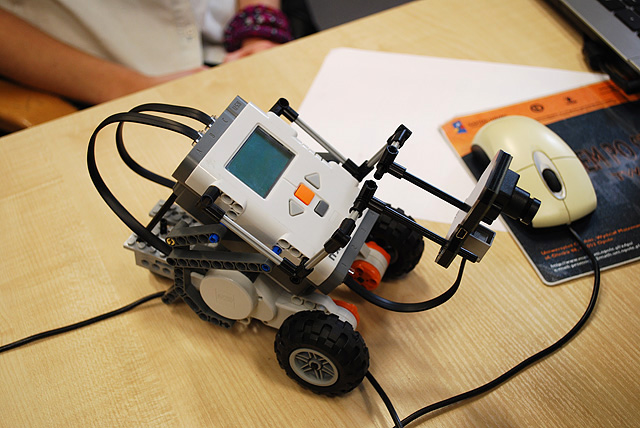
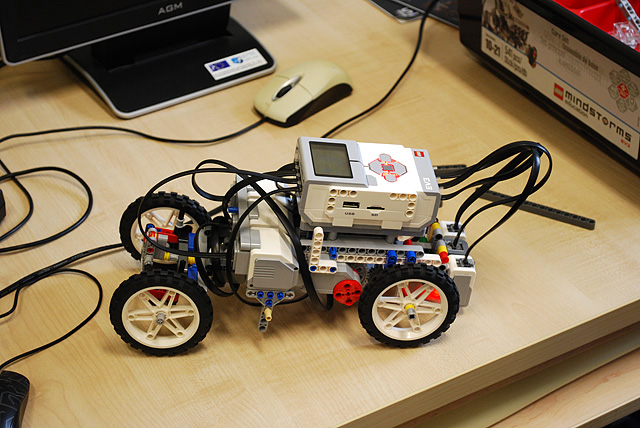
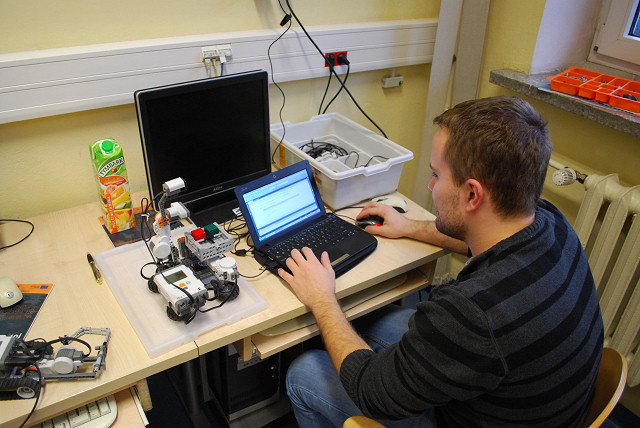
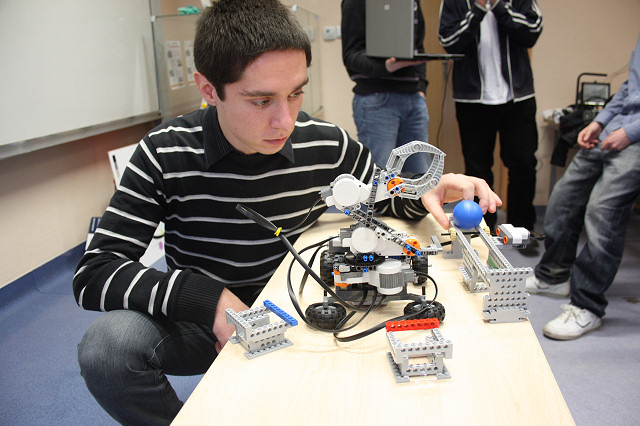
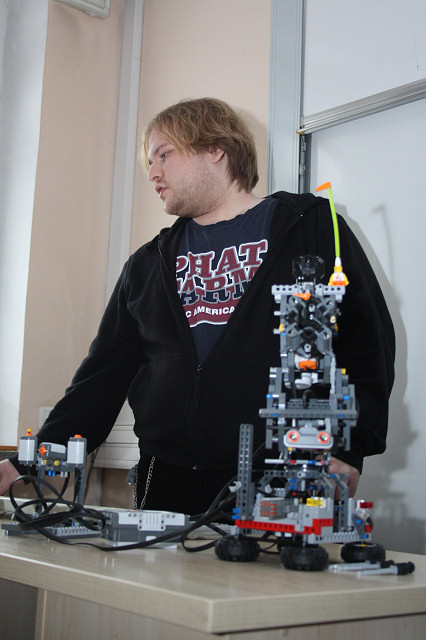
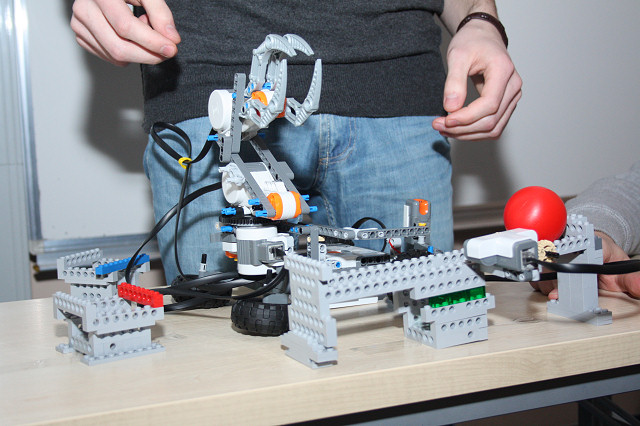
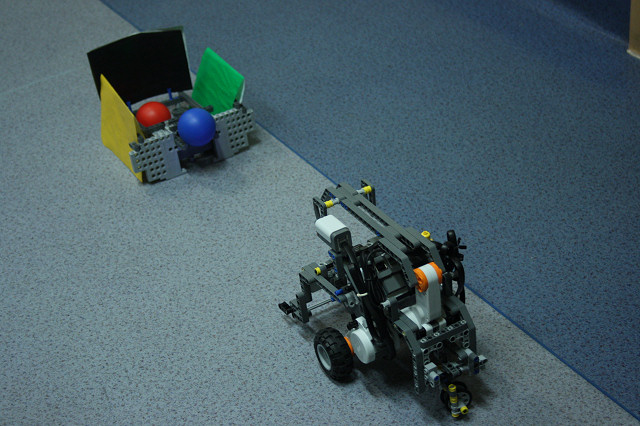
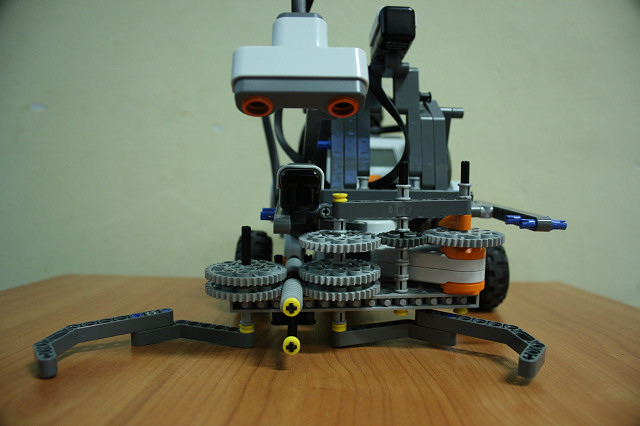
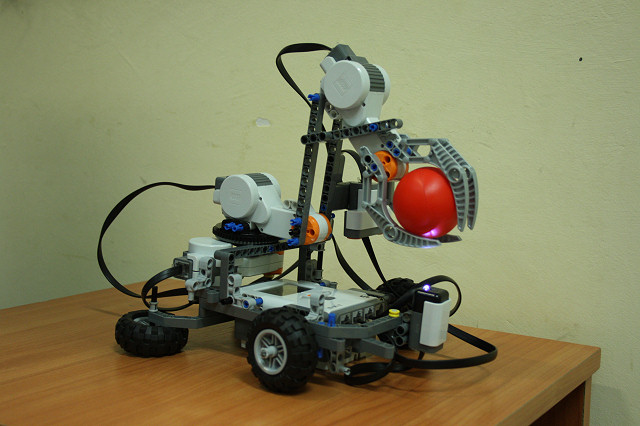
Projekt i implementacja gry wykorzystującej zestaw Lego NXT
Projekt i implementację gry wykorzystującej sterowany mikrokontrolerem zestaw Lego NXT wykonał absolwent studiów I stopnia kierunku informatyki Adam Huńka. Projekt został wykonany w ramach pracy inżynierskiej przygotowanej pod kierunkiem dra Jacka Iwańskiego.
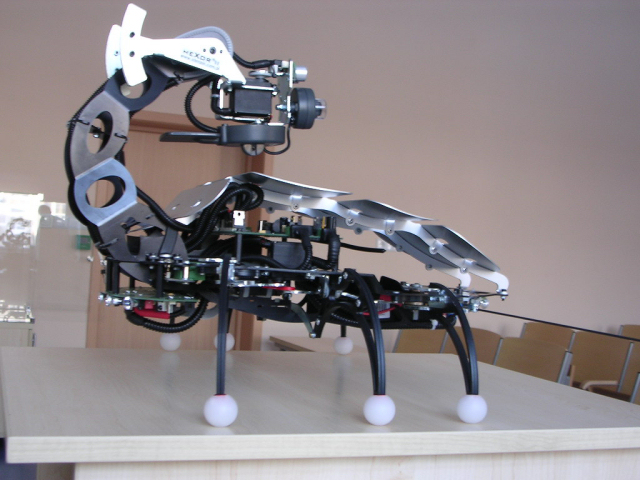
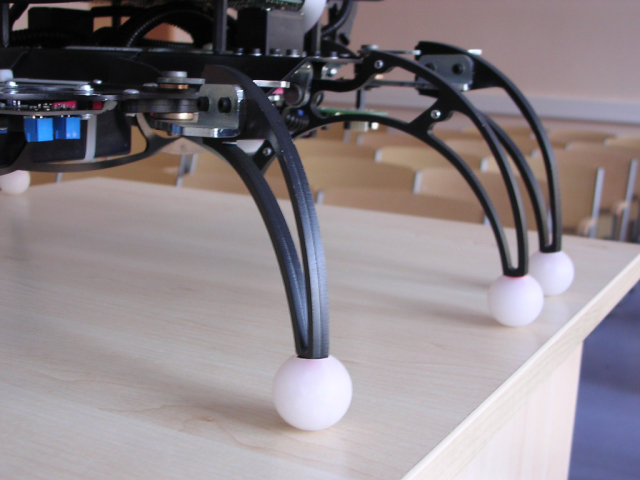
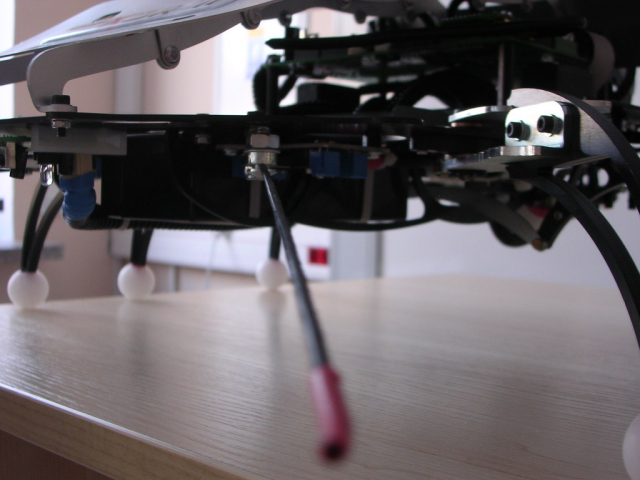
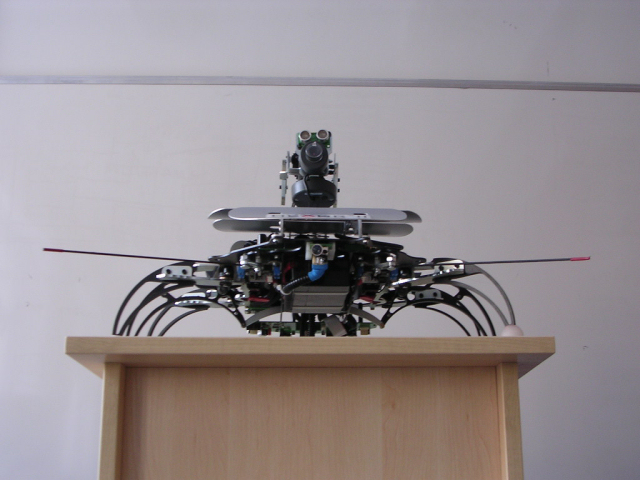
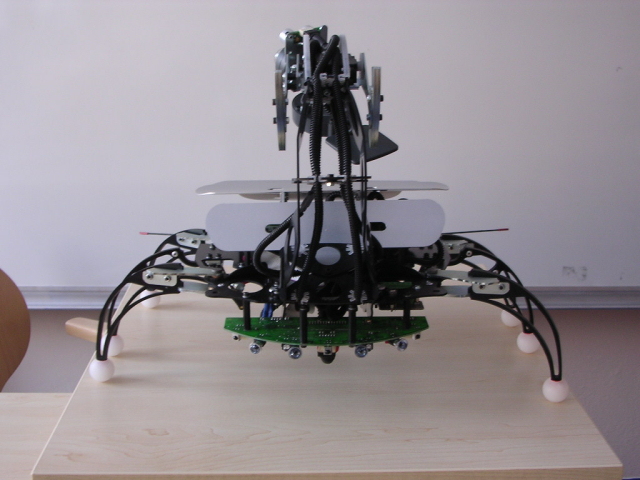
Robot Hexor II który posiadamy w Instytucie Matematyki i Informatyki jest robotem w pełni mobilnym, zaopatrzonym w 6 odnóży i żelowy akumulator. Wszystkie rozwiązania technologiczne w nim zastosowane są współcześnie używane w przemysłowych procesach technologicznych.
Wewnątrz znajduje się dedykowana płyta główna z procesorem. Do niej podłączone są wszystkie zmysły (czujniki), za jej pośrednictwem odbieramy/obsługujemy zdarzenia z nimi związane. Głowica umieszczona na szczycie ogona ma 2 stopnie swobody, porusza się w pionie i poziomie z ograniczeniem ~90°. Co pozwala robotowi rozglądać się bez potrzeby obracania całego korpusu.


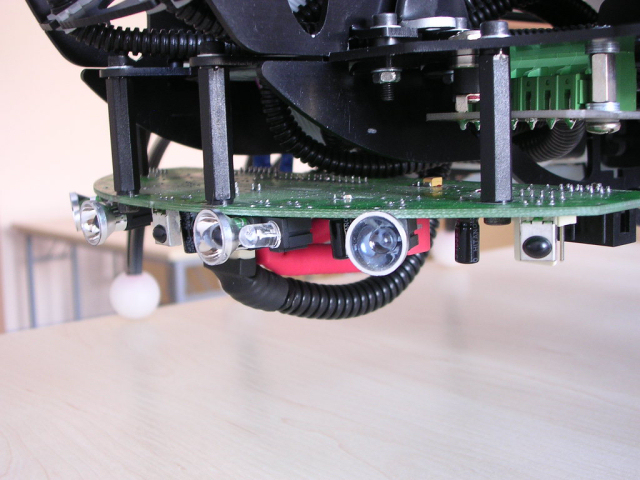
Czujniki:
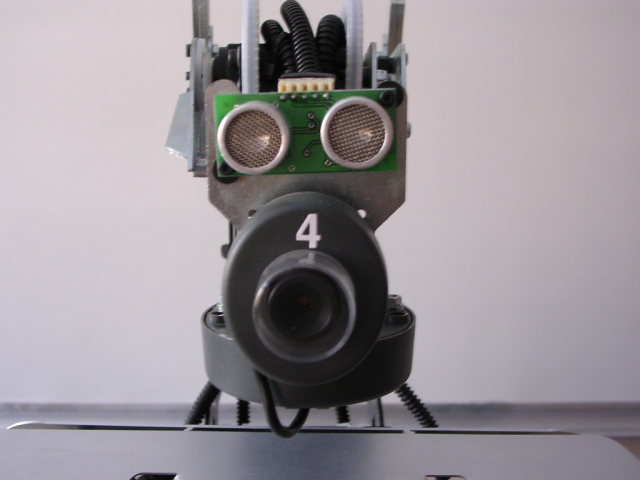
Sonar (ultradźwiękowy czujnik odległości): nadajnik i odbiornik fal umieszczone są na końcu ogona nad kamerą, ten układ zwraca przybliżoną odległość od najbliższego obiektu, oczywiście powierzchnie dźwiękochłonne są dla niego niewidzialne.

Wąsy (czujniki dotykowe): umieszczone z przodu robota przesyłają impuls w chwili “dotknięcia”, a więc fizycznego kontaktu z przeszkodą, w odróżnieniu od sonaru działa na każdej powierzchni.


Czujniki podczerwieni (zbliżeniowe): 1 z przodu, aż 4 z tyłu (ze względu na brak czujników dotykowych w tylnej części). Dzięki temu zestawowi można robotem sterować za pomocą pilota do telewizora.
Płyta główna posiada moduł komunikacyjny, szeregowe łącze radiowe o prędkości transmisji do 78 kb/s, za jego pomocą możemy komunikować się z robotem bezprzewodowo wydając polecenia z komputera.
Na głowicy ogona umieszczona jest kamera analogowa. Jest ona niezależna od reszty komponentów i posiada własną antenę (2.4GHz), obraz z niej również można oglądać na ekranie monitora komputera.